
机械手末端执行器一般有三种:气动夹爪、吸盘、传统短行程电爪。
首先是气动夹爪。这种夹爪一般是根据项目需求非标定制的。
“比如生产线是生产 iPhone4,就需要针对 iPhone4 外壳的大小定制。如其外壳是 58mm,厂商就制作一个针对抓 58mm宽的小行程气动夹爪,开合仅仅 5-10mm,只抓取这一个工件。
吸盘主要用于食品软包、堆箱码垛等平整易于吸取物体的应用场景中。
气动方案需要现场气源等配套设施,AGV 等移动场合不适用。
传统电动夹爪,其好处是不需要现场气源,只需电线或者信号线就可以了,简单易操作。也需要定制,换产品则需要更换夹爪。
工厂需要夹具,在找不到合适的执行器的时候,往往会对每一个产品开发一款相对应的夹具及对机器人编程,耗时耗力,而且不能用于其他产品上。
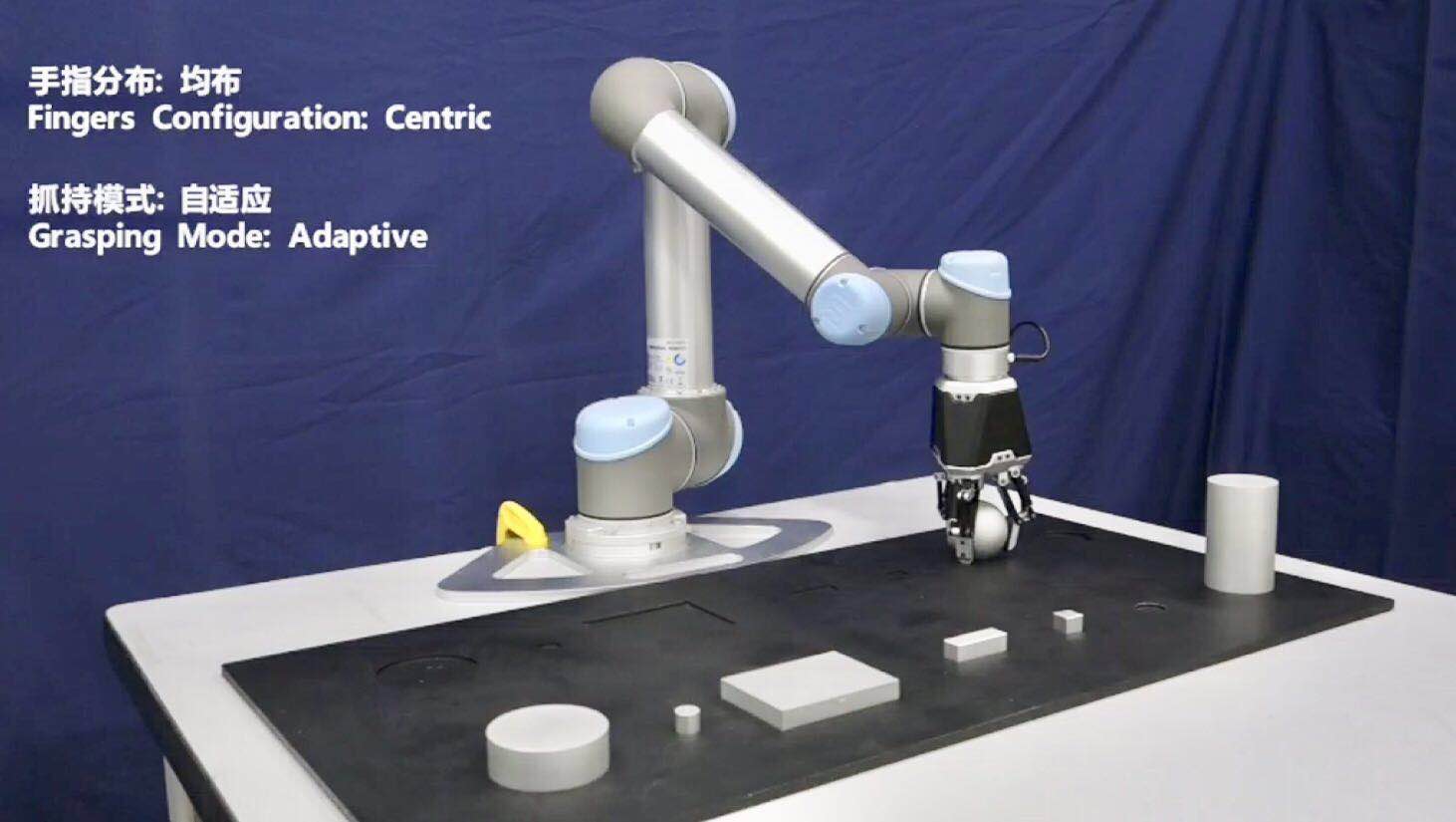
这种新型机械手可自动适应不同形状的被抓取物体,无需更换手爪,实现一“手”多用,相比于传统的抓取方案更加方便和灵活。一定程度上标准化了夹具产品,可以兼容各种工业/协作机器人手臂,一定大小与重量范围内,对不同的抓取物品不需要重新更换手爪,大大降低了工厂的成本,提高了生产效率。抓取行程可超 100 mm,也就是说可以适应各种大小的物件。
当然,除了可以适应各种大小的物件,还可以在抓取软硬不一样的物件时,调整抓取力度。这是一项很有用的功能。“对硬和重的物件,我可以把抓力调大,如果是软包和易碎品的抓取,可以将抓力相应减小。”许双甲介绍道,调整抓力的方式有几种:
一是人为在系统的固定程序里调整。二是通过机器视觉图像识别来给生产线上的物件与系统的固定程序模板进行匹配相应的抓力。就像人的眼睛看到了一个苹果,他的大脑里就会告诉需要多大的力气去抓取这个苹果。
